




















کنترل سرعت موتورهای DC
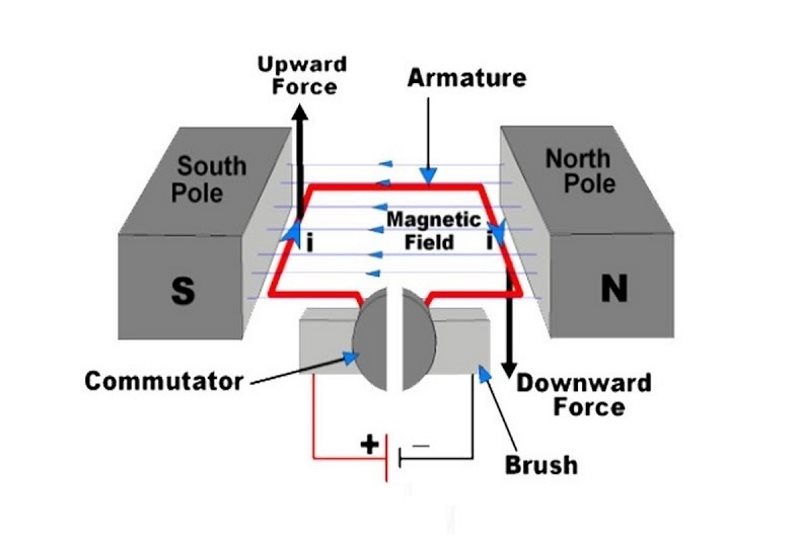
مزیت اصلی موتورهای DC، قابلیت کنترل مشخصه سرعت-گشتاور آنها در بازه گستردهای از سرعتهای مختلف برای یک گشتاور خاص است. البته امروزه داریوهای AC سرعت متغیر این قابلیت کنترل سرعت را به موتورهای القایی دادهاند. هرچند، هنوز هم موتورهای DC در بسیاری از کابردهای صنعتی مورد استفاده قرار میگیرند.
معادله سرعت (معادله (۱)) موتور DC شنت را در نظر بگیرید. در این معادله، دو متغیر قابل کنترل وجود دارد که میتوان از آن برای تغییر سرعت موتور استفاده کرد.
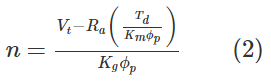
که در آن، n سرعت، Vt ولتاژ ترمینال، Ia جریان آرمیچر، Ra مقاومت آرمیچر، Kg ثابت نیرو محرکه و Φp شار است. در عمل، کاهش شار در مخرج معادله بالا، سبب افزایش ولتاژ میشود. این کار را میتوان به سادگی و با تغییر مقاومت رئوستای میدان انجام داد. متغیر قابل کنترل دیگر، ولتاژ ترمینال موتور است. با کاهش ولتاژ ترمینال، سرعت افت خواهد کرد. یک امکان دیگر برای تغییر سرعت، تغییر مقاومت مدار آرمیچر است.
این سه روش در شکل زیر مشخص شدهاند:
کنترل جریان یا شار میدان
کنترل شار میدان، متداولترین روش کنترل سرعت یک موتور DC شنت یا کمپوند است. در این روش کنترلی، جریان به بالاتر از مقدار پایه که توسط ولتاژ ترمینال تعیین شده، افزایش داده میشود.
این روش، ساده و ارزان است و موجب تغییرات زیاد در تلفات موتور نخواهد شد. کمترین سرعت دستیافتنی یک موتور DC شنت در یک ولتاژ ترمینال داده شده، زمانی رخ میدهد که رئوستای شار میدان روی صفر تنظیم شود.
با افزایش مقاومت از طریق تنظیم رئوستا، جریان و شار میدان کاهش مییابد. اگر شار هر قطب کاهش یابد، مخرج معادله (۱) نیز کاهش مییابد و در نتیجه، سرعت ماشین زیاد میشود.
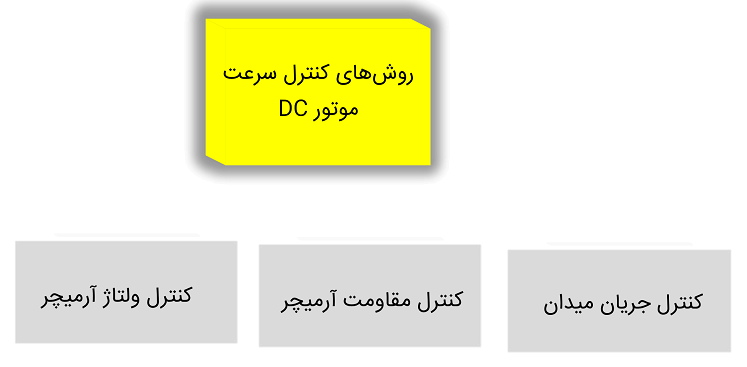
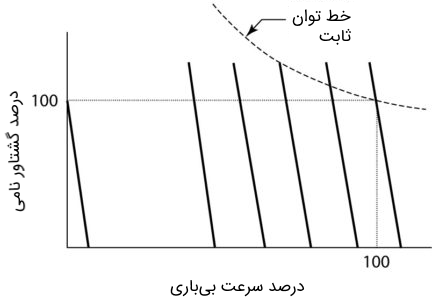
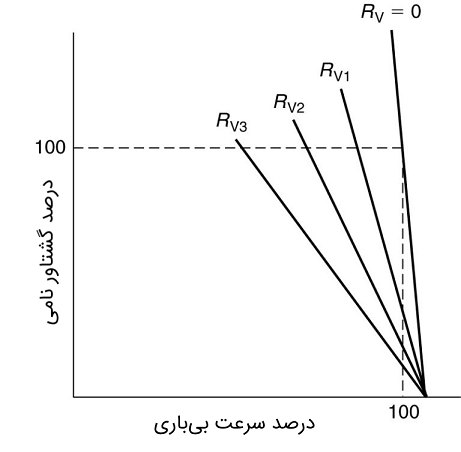
شکل 1: کنترل موتور DC شنت با مقاومت میدان شنت
شکل ۱، گشتاور در برابر سرعت یک موتور DC شنت را برای مقاومتهای میدان مختلف نشان میدهد. رابطه معادله (۲) بین سرعت و گشتاور موتور، خطی است، بنابراین، وقتی گشتاور زیاد شود، سرعت به صورت خطی افت میکند.
سرعت پایه، سرعتی است که در آن، ولتاژ نامی به موتور اعمال شده و گشتاور نامی را تولید میکند.
با افزایش مقاومت رئوستا، به خط گشتاور-سرعت جدیدی میرسیم که سرعت کاری در آن، بالاتر از سرعت پایه موتور است. شکل 1، دو خط دیگر را نشان میدهد.
باید دقت کنیم که موتور، توان مشخصی دارد. بنابراین، باید تضمین کنیم که موتور دچار اضافه بار نشود. همانطور که میدانیم، توانی که یک موتور تحویل میدهد، حاصلضرب سرعت در گشتاور آن است. بنابراین، داریم:
![]()
که در آن، ω سرعت چرخشی زاویهای موتور و T گشتاور روی شفت است.
از معادله (۳) مشخص است که برای داشتن توانی ثابت، افزایش سرعت، نیازمند کاهش گشتاور است. این بدین معنی است که وقتی سرعت کاری کاهش پیدا میکند، گشتاور نامی باید کاهش یابد. خطوط منقطع شکل 1 نشان میدهد که در توان ثابت، گشتاور باید چگونه کاهش پیدا کند.
روش مقاومت میدان برای کنترل سرعت را میتوان کنترل توان ثابت نیز نامید. البته توان حقیقی به بار بستگی دارد. از آنجایی که با کنترل مقاومت میدان میتوان سرعت موتور را افزایش داد، باید روش دیگری را برای کاهش سرعت موتور به کار گرفت.
کنترل ولتاژ آرمیچر
با نگاهی به معادله (۱) درمییابیم که با فرض بدون تغییر ماندن شار در هر قطب، با کاهش ولتاژ ترمینال، سرعت موتور کم میشود.
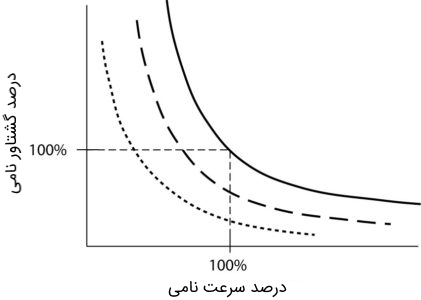
شکل 2 اثر کاهش ولتاژ اعمالی به موتور را نشان میدهد. در حالت ماندگار، کاهش ولتاژ ترمینال با یک کاهش معادل در C-EMF همراه است.
اگر شار ثابت بماند (با تحریک جداگانه میدان یا تنظیم رئوستا)، سرعت موتور مستقیماً با ولتاژ تغییر خواهد کرد.
شکل 2: کنترل ولتاژ آرمیچر یک موتور DC
اگر سرعت به کمتر از سرعت پایه کاهش یابد، میتوان گشتاور را در 100 درصد مقدار نامی نگه داشت، اما توان تغییر خواهد کرد، زیرا ω کوچکتر شده است.
مقادیر ماکزیمم شار و جریان آرمیچر در رابطه Td=KmϕpIa اساساً با توجه به آهن و مس موتور ثابت هستند.
شکل ۲، یک خط توان ثابت را نشان میدهد که واضح است به مقداری بیش از گشتاور نامی نیاز دارد، زیرا سرعت افت کرده است. در نتیجه، هنگام کاهش سرعت، توان موتور باید کاهش یابد.
این روش کنترل سرعت، درایو (کنترل) گشتاور ثابت نامیده میشود و بدین معنی است که موتور گشتاور نامی را تحویل میدهد. در حقیقت، یک موتور DC میتواند گشتاور نامی را در سرعت صفر تحویل دهد.
با ترکیب کنترل مقاومت میدان و ولتاژ آرمیچر، میتوان به سرعت کاری در بازههای بسیار گستردهای دست یافت.
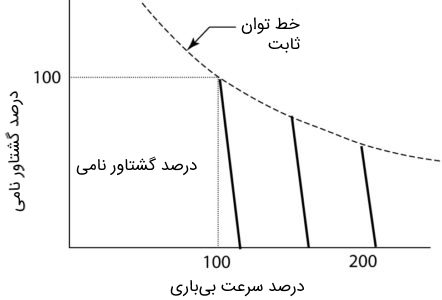
شکل ۳، گشتاور و توان نامی یک موتور DC را نشان میدهد. در زیر سرعت پایه، گشتاور ثابت و توان متغیر است، در حالی که بالاتر از آن، توان ثابت و گشتاور متغیر است.
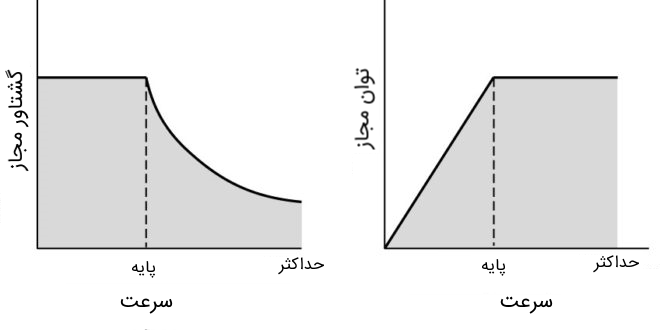
شکل 3: نمودار گشتاور و توان موتور DC
کنترل مقاومت آرمیچر
با نگاهی دوباره به معادله سرعت (معادله (۱))، میبینیم که با فرض ثابت ماندن ولتاژ ترمینال و شار میدان، افزایش مقاومت مدار آرمیچر، سبب کاهش سرعت موتور میشود. شکل ۴، چگونگی افزایش مقاومت را با قرار دادن مقاومت متغیر نشان میدهد.
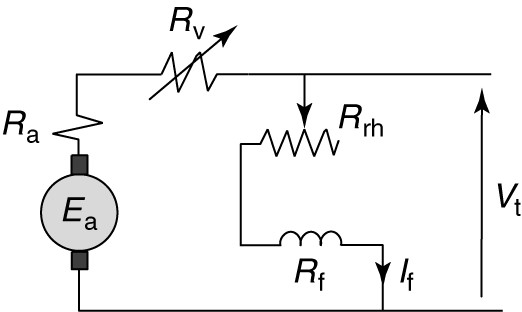
شکل 4: مدار معادل یک موتور DC شنت با کنترل مقاومت آرمیچر
برای جلوگیری از اثرپذیری شار میدان، افزودن یک مقاومت اضافه به مدار آرمیچر امری ضروری است.
شکل ۵، چگونگی تغییر سرعت موتور را هنگامی نشان میدهد که مقاومت به مدار آرمیچر افزوده شده است. افزودن مقاومت مدار آرمیچر، سبب تغییر شیب مشخصه گشتاور-سرعت میشود.
با اینکه پیادهسازی این روش نسبتاً آسان است، به دلیل توان تلف شده مقاومت، تلفات اضافهای به سیستم تحمیل میکند.
شکل 5: تغییرات سرعت یک موتور DC شنت با کنترل آرمیچر
کنترل سرعت موتور سری
سرعت یک موتور DC سری را میتوان با ولتاژ آرمیچر یا مقاومت مدار آرمیچر کنترل کرد.
همانطور که درباره موتور شنت گفتیم، کنترل مقاومت، روشی ارزان اما کمبازده است. از سوی دیگر، کنترل ولتاژ روشی پربازده اما گران است. نتیجه هر دو روش، اساساً مشابه است که در شکل 6 نشان داده شده است.
افزودن مقاومت آرمیچر به مدار یا کاهش ولتاژ ترمینال، سبب میشود موتور گشتاور نامی را در یک سرعت پایینتر یا گشتاور کمتری را در سرعت نامی تولید کند که با منحنیهای نقطهچین و خطوط منقطع نشان داده شدهاند.
شکل 6: کنترل سرعت یک موتور DC
البته در سالهای اخیر، با توجه به گسترش پردازشگرهای دیجیتال، روشهای کنترلی پیشرفته معرفی شدهاند.
